When I first built FCATS Katzenschreck, it was a fun proof of concept — a headless, AI-powered cat detection system running on small edge devices.
Now, it’s faster. Much faster.

🧠 From Raspberry Pi to Jetson Xavier NX
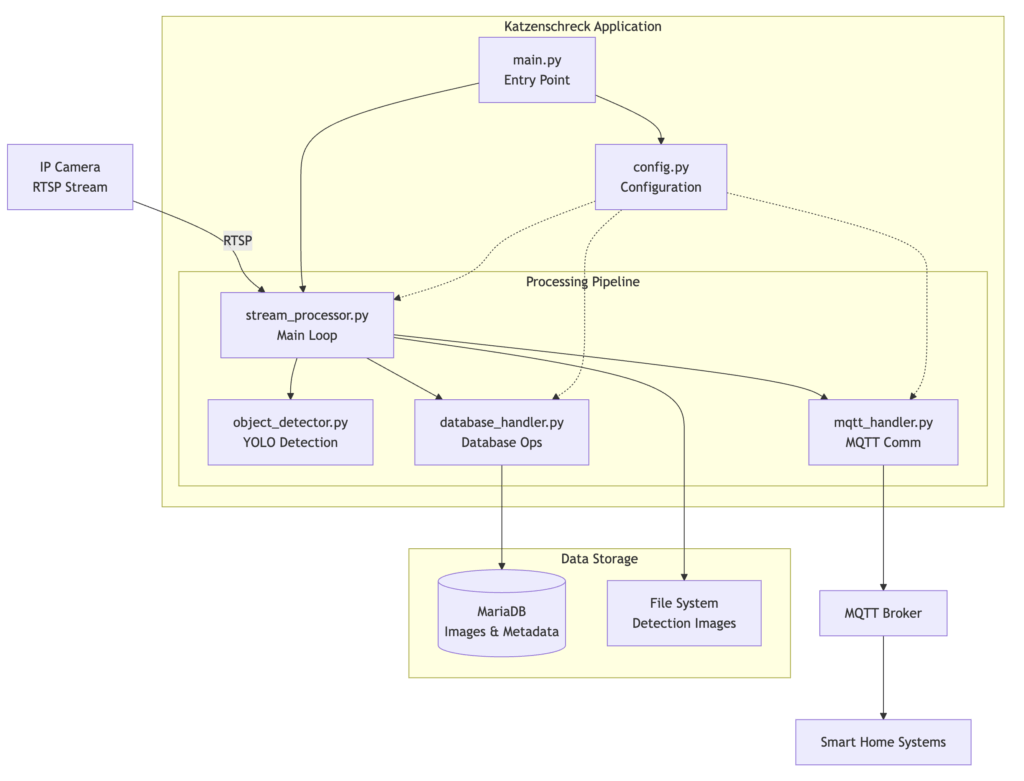
I’ve ported the entire inference script into a Docker container running on an NVIDIA Jetson Xavier NX Developer Board. The performance jump is incredible:
| Device | Model | Inference Time |
| Raspberry Pi 3 | YOLOv11x | ~50 seconds per frame |
| Raspberry Pi 4 | YOLOv11x | ~18 seconds per frame |
| Jetson Xavier NX | YOLOv11x | 188 ms per frame |
That’s not just faster — it’s real-time.
The Jetson can even host multiple inference containers simultaneously, so scaling across multiple cameras is finally practical.
🐈 Training with Real-World Data
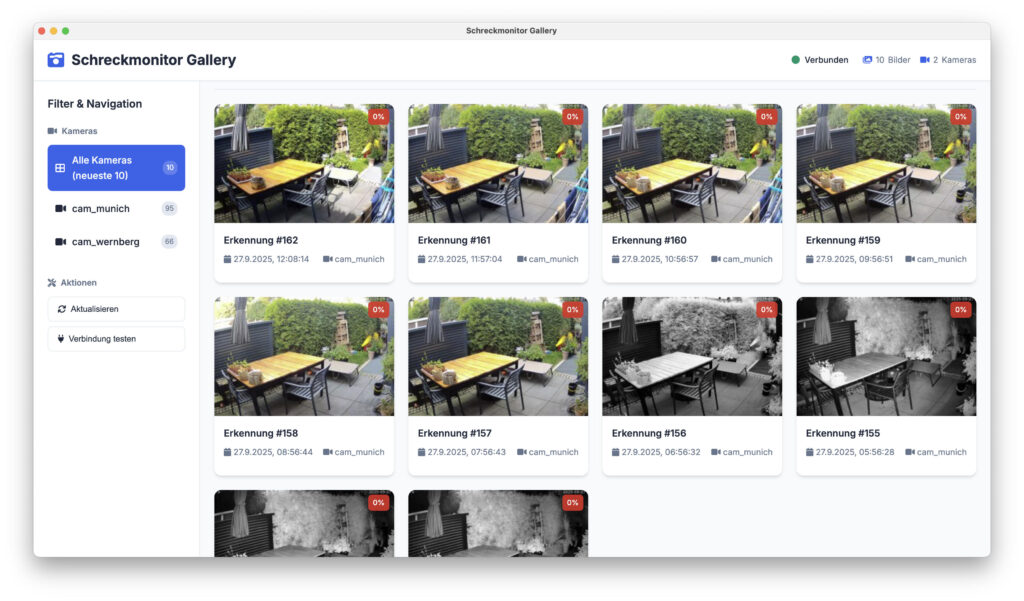
Over the last two months, Katzenschreck has been quietly watching (24/7) a specific outdoor spot — collecting data on feline intruders.
I used this footage (~4.5 GB of JPEG frames) to fine-tune my model:
- Re-labeled the dataset for precision.
- Added data augmentation (lighting, perspective, random occlusion).
- Retrained using YOLOv11x with my own MLOps pipeline for regular re-training.
The result? The system now detects cats more reliably, even in poor lighting or partial occlusions — and false positives dropped noticeably.
🧰 What’s Next
Next up, I’ll publish a detailed look at my improved model performance metrics — including confidence scores, precision-recall curves, and a few live comparison demos.
Stay tuned — and if you’ve ever wanted to see what happens when DevOps meets wildlife control, this might be the most overengineered example yet 😄
Update, 2025-12-23: Attached you can find my trained model that improved my accuracy by +10%: https://www.andremotz.com/wp-content/uploads/2025/12/best.pt_.zip