My portfolio should give you an idea about who I am and what I do.
Robotics – Prototype #1
Since a couple of time I had in mind to continue with some servos, sensors and breadboards to build some robots, that soon or later will conquer the world
Since a couple of time I had in mind to continue with some servos, sensors and breadboards to build some robots, that soon or later will conquer the world 🙂 But how to start? Due to a small project in my job I came into touch with Node.js. Beside of that I’ve just stumbled upon … <a href="https://www.andremotz.com/robotics-prototype-1/" class="more-link">Continue reading <span class="screen-reader-text">Robotics – Prototype #1</span></a>
Since a couple of time I had in mind to continue with some servos, sensors and breadboards to build some robots, that soon or later will conquer the world 🙂 But how to start? Due to a small project in my job I came into touch with Node.js. Beside of that I’ve just stumbled upon … <a href="https://www.andremotz.com/robotics-prototype-1/" class="more-link">Continue reading <span class="screen-reader-text">Robotics – Prototype #1</span></a>
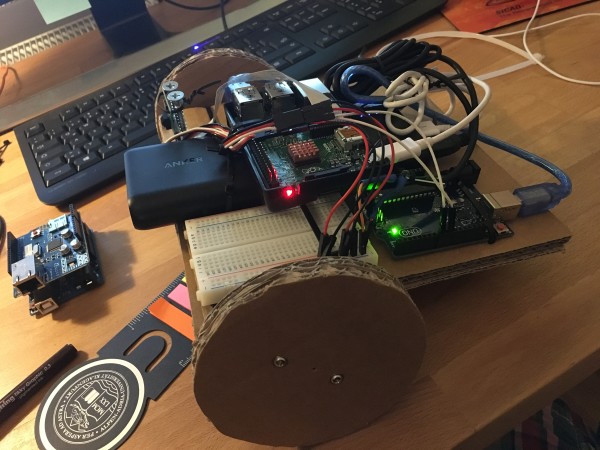
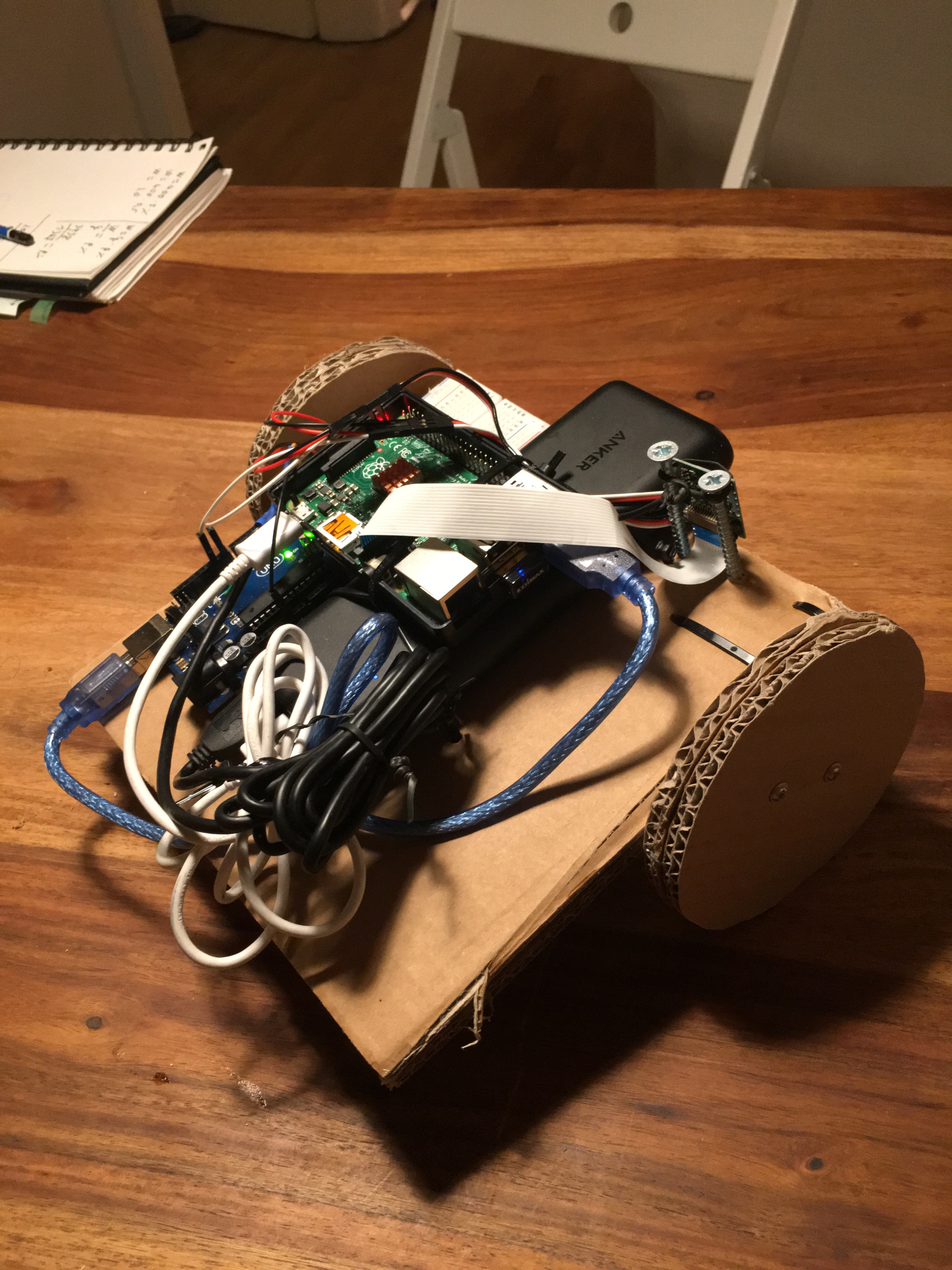
As my first project I wanted to continue with some servos (see my former project PongReal, where I’ve done some action with a servo and a motor), so I organised some continuous rotation servos, attached an Arduino-clone and a Raspberry Pi + Wifi, to create something automuous.
The code is not very sophisticated – it is based on the API-examples of Johnny-Five’s documentation. Do I didn’t make any efforts to publish it on my GitHub.

{kind=link}
{kind=link}

